 Loading Image... Loading Image...
Loading Image... Loading Image...
В статье описывается декодер ADS-B сигналов передаваемых ответчиками воздушных
судов, оборудованных системой Automatic Dependent Surveillance - Broadcast, на частоте 1090 МГц.
Ответчики ADS-B находят всё более широкое применение, особенно в западной Европе, и призваны
облегчить управление воздушным движением, дополняя информацию получаемую от радиолокаторов о
местоположении, курсе, высоте и пр. воздушных судов.
Предлагаемая конструкция состоит из приёмника прямого усиления, декодера, собранного
на микроконтроллере Atmega8 и разработанного программного обеспечения ADSBox, работающего
на ОС Linux. Всё программное обеспечение приведено в исходных кодах. Система собрана в
виде макета. Опробована работа совместно с программой PlanePlotter, организована трансляция
принимаемых данных на сайт flightradar24.com. Также
возможно отображение данных через встроенный в программу web-интерфейс и программу Google Earth.
Источниками сигнала могут быть различные доступные на рынке любительские приёмники ADS-B, а также SDR USB приёмники.
Проведён эксперимент с определением координат
воздушных судов, не передающих свои координаты, с помощью метода мультилатерации (MLAT). Для этой
задачи был разработан специальный декодер ADS-B.
Передача ADS-B сигналов осуществляется на частоте 1090 МГц. Разработка
приёмника на указанный диапазон для человека, не имеющего опыта работы с СВЧ цепями
представляется непростой задачей, поэтому был приобретён набор для сборки. Oписание
конструкции и рекомендации по сборке приведены на miniadsb.web99.de.
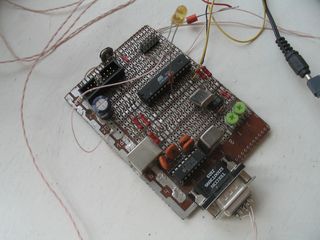
Собранный по рекомендациям поставщика приёмник начинает работать сразу и
не требует настройки. Приёмник в сборе показан на рис.

В качестве антенны применена J-антенна, как наиболее простая в изготовлении
и обеспечивающая хорошую защиту от статического электричества. Рекомендации по изготовлению
антенны можно найти на странице http://www.lll.lu/~edward/edward/adsb.
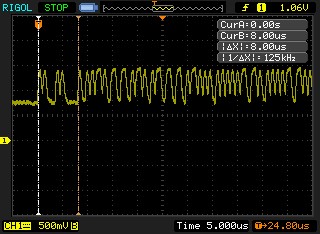
При наличии осциллографа работу приёмника можно проверить подключившись к его выходу. На рисунке ниже
показано начало приняого ответного сигнала Mode-S. Преамбула выделена курсорами.
Выход приёмника соединён с декодером, основной частью которого является
микроконтролер. За основу декодера взята конструкция с сайта
http://www.lll.lu/~edward/edward/adsb. Однако, был переработан исходный код прошивки
микроконтроллера: за неимением контроллера Atmega48, был применён контроллер Atmega8-16PI; кроме
того была убрана часть кода, управляющая sat-тюнером, применявшимся в оригинальной разработке.
Схема включения микроконтроллера полностью соответствует указанной на сайте,
поэтому здесь не приводится. Декодер собран на макетной плате.
Следует отметить, что хотя чип Atmega8-16PI предназначен для работы с максимальной частотой 16МГц,
отдельные экземпляры, видимо, работают на частоте 20МГц, что и было с успехом использовано. Работу декодера
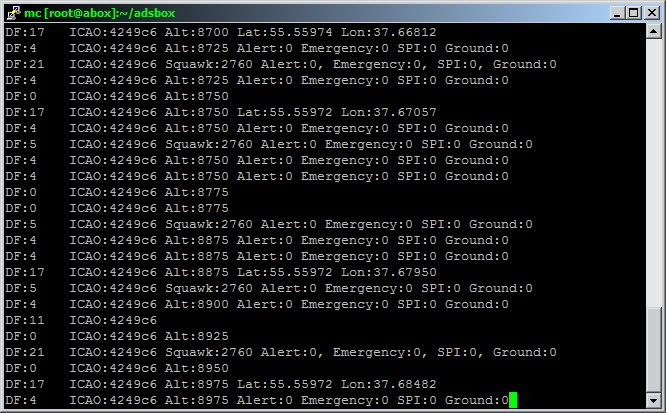
можно проверить, подключив к его последовательному порту (115200 8N1) терминальную программу. Будут выводиться данные,
как показано на рис.

Предполагается круглосуточная работа ADS-B декодера, однако, имющееся ПО, предназанченное
для декодирования работает на персональных компьютерах, постоянная работа которых не всегда
возможна. Поэтому было принято решение разработать собственное программное обеспечение, а в
качестве платформы использовать плату, оснащенную процессором ARM9 AT91SAM9XE512 и ОС Linux, и потребляющую мало
энергии (вся система работает от блока питания со стабилизатором 7805).
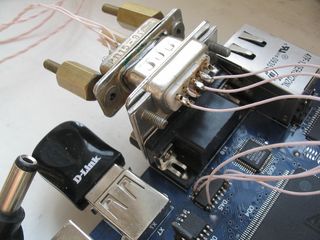
Плата была приобретена на сайте starterkit.ru.

Плата была доработана - выведен второй порт RS-232, для соединения с декодером; первый порт используется
в качестве консоли. Кроме того, к плате подключён USB WiFi модуль D-Link DWA-131, что позволяет
подключать систему к домашней беспроводной сети.
Использованная автором плата не является единственным выбором. В качестве платформы для работы ПО ADSBox возможно выбрать
практически любую плату с ОС Linux из представленных на рынке, таких как Raspberry Pi,
Cubieboard, VoCore. Можно даже
использовать домашние роутеры с установленной ОС Openwrt. Конечно,
остаётся возможность работы программы на персональном компьютере x86 с ОС Linux. Вообще, выбор
аппаратной платформы ограничивается наличием для неё компиллятора gcc. Общий вид собранной системы показан на рис.

В качестве источника данных для ПО ADSBox можно использовать любой из типов приёмников, описанных ниже. Возможна
также одновременная работа любого количества источников, а также их комбинации.
- Текстовый файл, записанный ранее с помощью ПО ADSBox;
- Последовательный порт с AVR текстовыми данными формата *..; или @..;
(например, использованный автором декодер на базе ATMega8 и приёмник
miniadsb);
- TCP или UDP сервер c AVR текстовыми данными (источником может служить ПО ADSBox, запущенное на другом узле сети);
- TCP сервер с данными формата SBS-1 (текстовый MSG формат);
- TCP сервер с данными формата SBS-3 (приёмники Kinetic Avionics);
- TCP сервер с данными формата binary beast;
- Портативные приёмники, работающие через USB-порт (например, microADS-B);
- USB SDR dongles на базе чипов R820T, E4000. Требуется наличие библиотеки rtlsdr в ОС Linux;
Тип и параметры источников данных устанавливаются с помощью опций командной строки. Таким образом, поддерживаются
практически все типы доступных на рынке любительских ADS-B приёмников.
ПО ADSBox выдаёт декодированные данные в различных форматах. Среди них
- Текстовый файл с отметками времени (может быть воспроизведён ПО ADSBox);
- AVR текстовые данные, выдаваемые через TCP или UDP сервер (могут передаваться на другой узел сети с ПО ADSBox);
- Данные в формате SBS-1, выдаваемые через TCP сервер (используются различными программами-визуализаторами, например, Planeplotter);
- Данные в формате JSON, выдаваемые через веб-сервер ADSBox (используется для визуализации информации ADSBox в браузере);
Сборка
ПО ADSBox поставляется в виде архива с исходным кодом. Перед сборкой необходимо отредактировать
файл Makefile для выбора платформы, на которой будет работать программа. Если надо собрать программу для
платформы ARM соответствующая строка в Makefile должна быть такой:
CC=arm-linux-gcc
Такая сборка предполагает наличие среды разработки arm-toolchain, включающей в себя кросс-компилятор.
Если надо собрать программу для платформы Intel, то строка в Makefile должна выглядеть так:
CC=gcc
Сборка исполняемого файла производится командой make. После её выполнения в каталоге появится исполняемый
файл adsbox, который и осуществляет передачу данных клиентским приложениям.
Последние версии программы используют SQLite в качестве оперативной базы данных, размещаемой
в памяти. Для компиляции таких версий следует загрузить amalgamation source с сайта
SQLite и развернуть архив в каталог sqlite3, находящийся
на одном уровне с каталогом исходного кода ADSBox. После этого, находясь в каталоге adsbox, выполнить
команду make.
Запуск и работа.
Программа может работать в режиме консоли, как показано на
рисунке, в этом случае на терминал выводятся декодированная
информация полученная от ответчиков воздушных судов; либо в режиме
демона, в таком случае программа
работает в фоне (основной режим) и на терминал ничего не выводится.
Имеется возможность указать местоположение приёмника через опции командной строки
(координаты можно взять на Google Maps), в этом случае на консоль выводится информация о дальности
до самолёта и подавляются сообщения о местоположении самолёта дальностью более 440 км (такие сообщения
трактуются как ошибочные).
Опции командной строки
-s, --serial [device file] создать источник данных - последовательный порт, например, /dev/ttyS0
--baud скорость последовательного порта
--bits число бит последовательного порта (7 или 8)
-d, --daemon работать в режиме демона
-l, --lat широта приёмника, например 55.0584
-g, --lon долгота приёмника, например, 39.3514
-r, --record [file] запись данных в файл
-p, --play [file] создать источник данных - записанный ранее файл
-x, --rate [n] воспроизведение из файла в n раз быстрее
-z, --snooze [n] сделать паузу n секунд перед воспроизведением из файла
--roll-interval [n] начать записывать новый файл после n часов
--seed запустить сервер данных ADS-B в формате AVR ASCII (по умолчанию 30004 порт)
--seed-port [port] запустить сервер данных ADS-B в формате AVR ASCII на указанном tcp-порте
--avr-server [IP] создать источник данных - внешний tcp-сервер (формат AVR ASCII) (по умолчанию 30004 порт)
--avr-server-port [port] соединиться с внешним сервером AVR ASCII на указанный tcp-порт
--beast-server [IP] создать источник данных - внешний tcp-сервер (beast binary) (по умолчанию 10005 порт)
--beast-server-port [port] соединиться с внешним tcp-сервером beast binary на указанный tcp-порт
--sbs1-server [IP] создать источник данных - внешний tcp-сервер (формат SBS-1, MSG) (по умолчанию 30003 порт)
--sbs1-server-port [port] соединиться с внешним сервером SBS-1 на указанный tcp-порт
--sbs3-server [IP] создать источник данных - внешний tcp-сервер (формат SBS-3) (по умолчанию 10001 порт)
--sbs3-server-port [port] соединиться с внешним сервером SBS-3 на указанный tcp-порт
--udp-server-port [port] создать источник данных - udp-сервер для приёма данных в формате AVR ASCII. Источником данных может быть
программа RTL1090 или ПО ADSBox, запущенное на другом узле сети
--udp-push-to [IP] отправлять данные в формате AVR ASCII по протоколу udp на указанный
IP-адрес. Приёмником данных может быть ПО ADSBox, запущенное на другом узле сети
--udp-push-port [port] отправлять udp-данные на указанный порт
--rtl-sdr[=n] создать источник данных - устройство SDR USB dongle как приёмник ADS-B сигналов (первое устройство по умолчанию, или указать его номер)
--gain [auto | val] установить автоматическое или требуемое усиление для SDR USB dongle
--agc установить AGC для SDR USB dongle
--freq-correct [ppm] установить коррекцию частоты ppm для SDR USB dongle
--iq-file [file] считывать данные из файла сэмплов SDR IQ
--db-edit разрешить в Query Analyzer запросы, модифицирующие базу данных
-h, --help справка
Порядок указания опций командной строки имеет значение. Вначале указываются опции, создающие
источник данных, затем опции, указывающие свойства этого источника. Примеры сценариев работы приведены ниже.
Набор опций командной строки расширятся вместе с расширением возможностей программы, их полный список
следует смотреть с опцией -h.
Аспекты декодирования ADS-B пакетов выходят за рамки этой статьи и подробно описаны в [1], [2], [3].
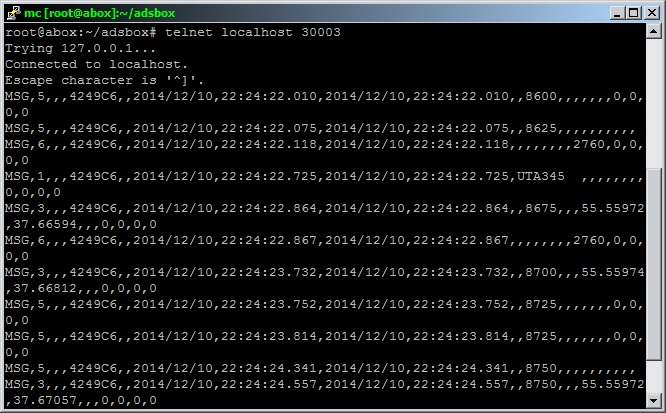
После запуска программа запускает сервер, прослушивающий TCP-порт 30003. Клиентские
приложения должны использовать этот порт для получения данных. Возможна одновременная работа
нескольких приложений. Данные поступают клиентам в формате SBS1 BaseStation. С описанием формата можно
ознакомиться на сайте.
Этот формат выбран как подходящий для работы с различными программами-визуализаторами данных ADS-B,
таких как PlanePlotter, а также для трансляции на сайт flightradar24.com.
После запуска программы можно проконтролировать её работу присоединившись программой telnet к
порту 30003 - см. рис.
Для автоматического запуска программы после загрузки системы потребуется редактирование инициализирующих скриптов. Подробнее об этом можно узнать из документации на ОС Linux.
ПО ADSBox допускает всевозможные сценарии использования, позволяющие создать систему наблюдения за
воздушной обстановкой, удовлетворяющую различные потребности пользователя. Некоторые способы запуска программы приведены ниже.
./adsbox -s /dev/ttyAMA0 --baud 2500000 --seed --seed-port 33010
-использовать в качестве источника данных декодер ADS-B с форматом данных AVR на последовательном порту /dev/ttyAMA0;
установить скорость порта 2500000 бод; запустить tcp сервер на порту 33010, отдающий данные в формате AVR для
сторонних программ.
./adsbox --avr-server 192.168.1.3 --avr-server-port 33010 --lat 57.62 --lon 36.81 --name REC1
--avr-server 192.168.1.9 --avr-server-port 33010 --lat 55.34 --lon 38.47 --name REC2
-использовать в качестве источника данных tcp-серверы с форматом данных AVR по адресам 192.168.1.3:33010, 192.168.1.9:33010;
указать географические координаты приёмников, их имена (REC1 и REC2). В случае указания координат приёмников, на карте отображаются
их позиции, а также круговые диаграммы приёма.
./adsbox --rtlsdr --gain auto --udp-push-to 192.168.1.20 --udp-push-port 1234
-использовать в качестве приёмника USB RTLSDR тюнер; установить усиление тюнера auto; передавать AVR данные
по протоколу udp на сервер 192.168.1.20:1234.
./adsbox --udb-server-port 1234 -d
-запустить прослушивающий udp-сервер на порту 1234 принимающий данные в формате AVR от сторонней программы, например, ПО ADSBox,
работающее на другом узле сети; работать автономно, в виде демона (на консоль ничего не выводится).
./adsbox --udb-server-port 1234 -d -r /root/adsb_log/data.log --roll-interval 2
-запустить прослушивающий udp-сервер на порту 1234 принимающий данные в формате AVR от сторонней программы, например, ПО ADSBox,
работающее на другом узле сети; работать автономно, в виде демона (на консоль ничего не выводится); записывать принятые данные в
каталоге /root/adsb_log; начинать новый файл записи каждые 2 часа.
(Примечание. Для экономии места на диске можно сохранять файлы
записи не старше указанного числа дней. Если нужно сохранять файлы 4 дня, необходимо добавить в crontab команду
find /root/adsb_log/* -mtime +3 -type f -delete)
./adsbox -p /root/adsb_log/data.log -n 4
-воспроизвести записанную ранее воздушную обстановку из файла data.log. Воспроизводить в 4 раза быстрее нормальной скорости.
Для отображения данных в программе PlanePlotter необходимо сделать следующие настройки:
-в меню Options-IO Settings отметить галку Mode-S/ADS-B, выбрать тип приёмника SBS1/RBv3 TCP;
-в меню Mode-S receiver-Kinetic SBS1-IP address прописать IP адрес сервера, на котором запущено ПО ADSBox;
-нажать кнопку Start
Через некоторое время, при наличии в радиусе приёма самолётов, на в окне программы на карте появятся их изображения.
Сайт flightradar24.com представляет собой карту мира, на
которой в близком к реальному масштабе времени отображаются находящиеся в небе самолёты. Данные на сайт передаются
добровольцами-владельцами приёмников ADS-B. В настоящее время область покрытия карты мира расширяется.
ПО ADSBox может быть использовано для организации такой передачи данных. Для этого необходимо обратиться
к администрации сайта и запросить клиентское программное обеспечение. Программное обеспечение поступает в
виде набора файлов, из которых для работы потребуется всего несколько. Кроме того, необходимо наличие
интерпретатора PHP на целевой платформе. Порядок действия следующий.
-создать каталог, например, /root/fr24
-скопировать в него файлы sbs1station.php, uploader.php, config.ini из набора, присланного flightradar24.com
-создать в том же каталоге исполнимый shell-скрипт fr24.sh такого содержания
#!/bin/sh
cd /root/fr24
/usr/bin/php /root/fr24/sbs1station.php &
/usr/bin/php /root/fr24/uploader.php
-запустить ПО ADSBox в режиме демона
-запустить трансляцию командой /root/fr24/fr24.sh > /dev/null 2>&1 &
Затем, можно открыть сайт flightradar24.com и убедиться, что на нём
присутствуют данные нашего радара. Можно добавить команду, запускающую скрипт fr24.sh в инит-скрипты, чтобы
трансляция начиналась после загрузки системы.

Обновление: этот способ трансляции больше не поддерживается flightradar24.com. Для трансляции следует использовать клиентское ПО fr24feed совместно с ПО ADSBox.
Программа ADSBox позволяет отображать воздушную обстановку в 3-х мерном виде в Google Earth. Для для этого необходимо отредактировать файл adsbox.kml, входящий в архив ADSBox, указав в нём IP адрес хоста, на котором запущен процесс adsbox. После этогo следует открыть файл adsbox.kml в Google Earth. В окне программы можно наблюдать движение воздушных судов. Щелкнув по иконке, изображающей самолёт, можно увидеть дополнительные сведения в виде всплывающего окна, см. рис.

Программа ADSBox имеет встроенный web-сервер, предназначенный для отображения оперативной информации о наблюдаемых воздушных судах, а также (в последующих версиях), для управления программой. Посмотреть информацию можно, открыв страницу http://192.168.x.x:8080. Примеры отображаемой информации представлены на рисунках ниже.

Рис. Вкладка Flight Board.
На вкладке Map отображается воздушная обстановка вокруг установленных приёмников ADS-B. Имеется возможность настроить внешний
вид карты, а также выбрать, какая информация будет отображена на карте: сервер-источник карт (доступно более десятка), цветовая схема,
вид меток воздушных судов и т.д.
Возможна работа с картами и в случае отсутствия доступа в интернет. Для этого на панели "Settings" необходимо
установить признак "Use map tile cache" и, находясь в режиме связи с интернетом, перемещать желаемый участок карты в
браузере, увеличивать и уменьшать его масштаб. При этом, в каталогe программы ADSBox будут сохраняться элементы карты. В случае
отсутствия связи с интернетом для отображения карты будут использованы сохранённые ранее элементы.

Рис. Вкладка Map. Панель настройки карты. Окно событий системы.
На карте можно включить отображение аэропортов, по щелчку на метке аэропорта появляется окно с текущей погодой (METAR).
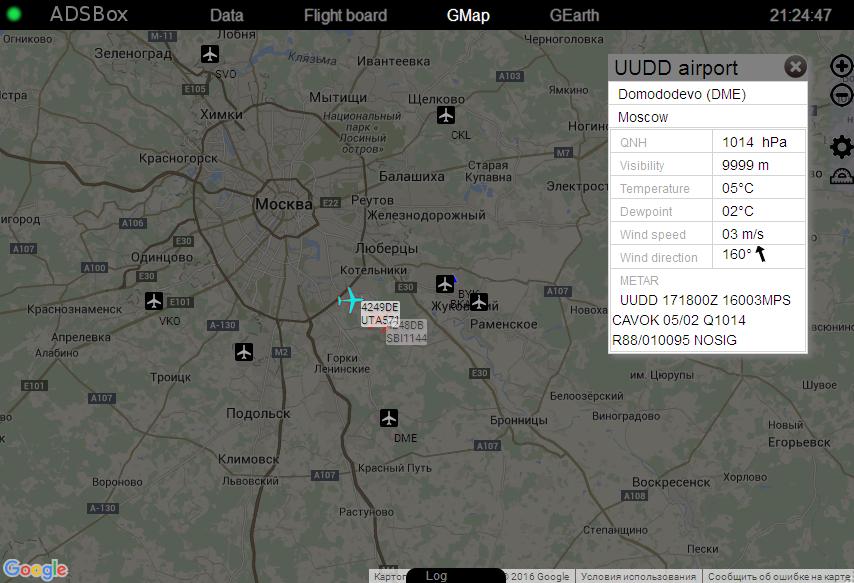
Рис. Отображение аэропортов и погоды.

Рис. Область покрытия приёмника.

Рис. Отображение расстояний приёмник - воздушные суда.

Рис. Отображение расстояний "ведущие"приёмники - выделенное воздушное судно.
При возникновении некоторых событий (взлёт-посадка, изменение squawk, установка новой высоты полёта) против соответствующей отметки на карте появляется собщение см. рис.

Рис. Всплывающие сообщения о событиях (анимация).
На карте предусмотрено измерение расстояний и азимутов между точками. Для перехода в режим измерений следует нажать на иконку с изображением транспортира (см. рис.). Точки устанавливаются щелчками мыши.
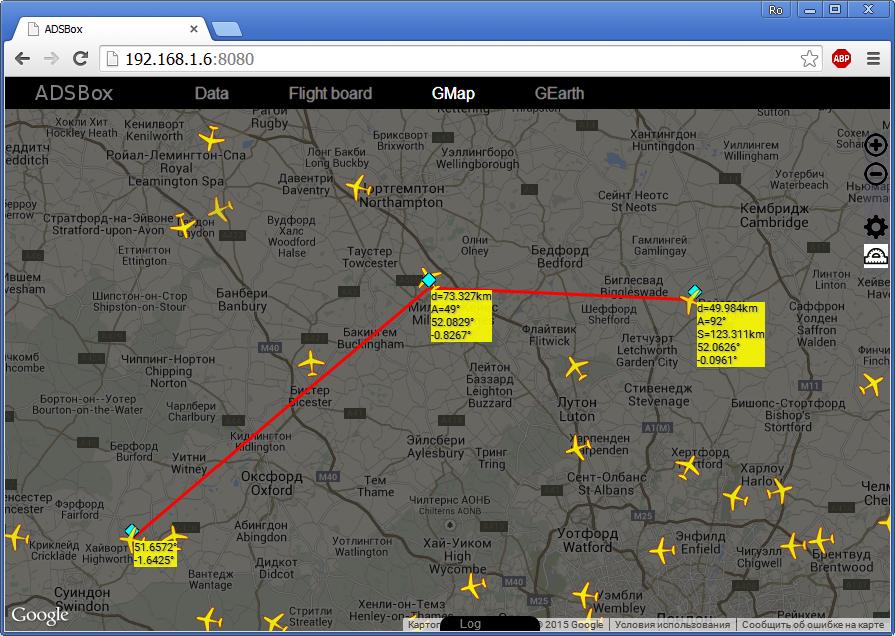
Рис. Измерение расстояний и азимутов.
Имеется возможность давать комментарии-заметки воздушным судам, выбирая их на карте. Добавление
комментария производится щелчком по иконке в ячейке ICAO на панели воздушного судна. Откроется окно с предложением ввести
комментарий, там же отображаются ранее введённые комментарии. При наличии у воздушного судна комментария, будет отображена
пометка на маркере воздушного судна.
Для выбранного воздушного судна может быть отображена имитация навигационного дисплея, находящегося на приборной панели
в кабине воздушного судна. Для этого следует нажать кнопку ND в ячейке Reg на панели воздушного судна. На дисплее отображается
курс и скорость воздушного судна, отметки ближайших аэропортов, а также маркеры соседних воздушных судов с информацией об их относительной
высоте и вертикальной скорости. По щелчку на масштабе дисплея (36nm) возможно переключение масштаба изображения.

Рис. Комментарий воздушного судна и навигационный дисплей.
Показана также панель ввода параметров для отчётов.
На карте возможно отображение дополнительных слоёв данных, представленных в файлах формата KML (см. рис.) Для отображения таких данных скопируйте файлы KML в каталог htdocs/kml. Файлы можно "включать", устанавливая галки на панели KML в окне Settings.

Рис. Дополнительные слои данных в формате KML.
На вкладке Data отображается статистика источников данных: название, количество переданных пакетов, объём данных, текущая скорость поступления пакетов. Имеется также обновляемый в реальном времени график скорости приёма пакетов. Отображается статистика потоков программы - загрузка CPU, время работы потока (uptime).

Рис. Вкладка Данные.
На вкладке Earth в 3-х мерном виде показана воздушная обстановка вокруг установленных приёмников ADS-B. Вид можно рассматривать с разных сторон, изменять масштаб. По щелчку на иконке воздушного судна будет отображена его траектория в 3-х мерном виде.
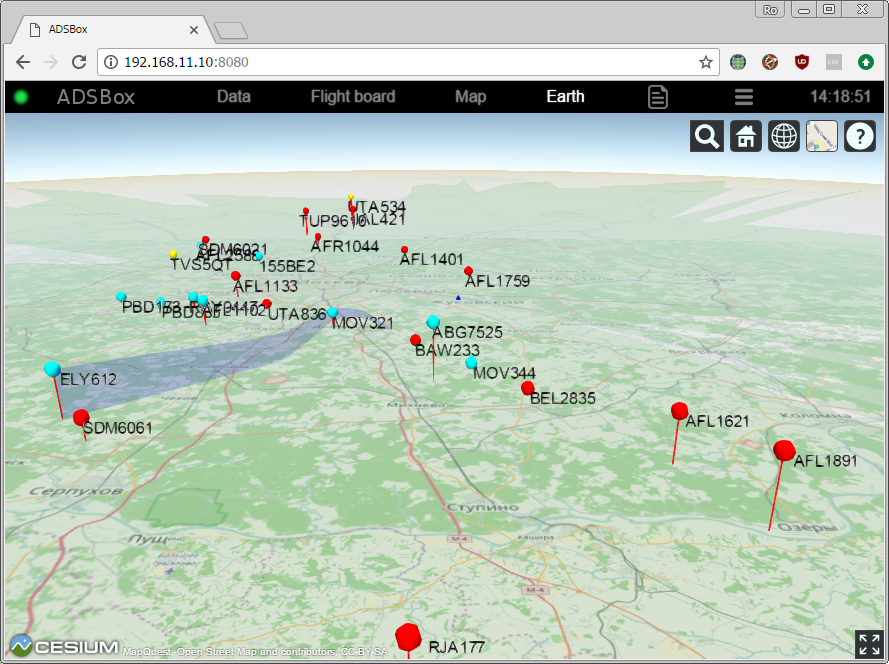
Рис. Вкладка Earth.
Для оперативного просмотра текущих и исторических данных разработана система отчётов на основе шаблонов. Применение шаблонов позволяет легко добавлять требуемые отчёты. Имеется возможность отображать данные как в табличном виде, так и в виде графиков. Отчёты, относящиеся к выбранным воздушным судам, вызываются щелчком по иконке отчёта в ячейке Contacts на панели воздушного судна. Прочие отчёты вызываются из панели верхнего меню программы. Некоторые из отчётов представлены на рисунках.

Рис. Отчёты "Профиль высоты и скорости" и "История наблюдений воздушного судна"

Рис. Отчёты "Количество наблюдаемых воздушных судов за день" и "История наблюдений рейса"

Рис. Отчёты "Диаграмма наблюдений воздушного судна" и
"Диаграмма наблюдений рейса" Хорошо видна регулярность рейса
Для удобства разработки ПО ADSBox имеется графический (через браузер) интерфейс к базе данных программы. Это позволяет исполнять SQL-запросы и получать необходимые данные прямо во время работы программы. Интерфейс доступен по ссылке sqlite.html веб-сервера ADSBox, см. рис.

Рис. Query Analyzer.
Программа ADSBox имеет модуль расширения, позволяющий производить расчёт местоположения воздушных судов, не передающих свои координаты, с помощью алгоритма мультилатерации (MLAT). Для работы в этом случае необходим приём с нескольких (минимум с трёх) приёмников ADS-B, расположенных на местности определённым образом. Пример работы системы в этом случае приведён на рисунке.
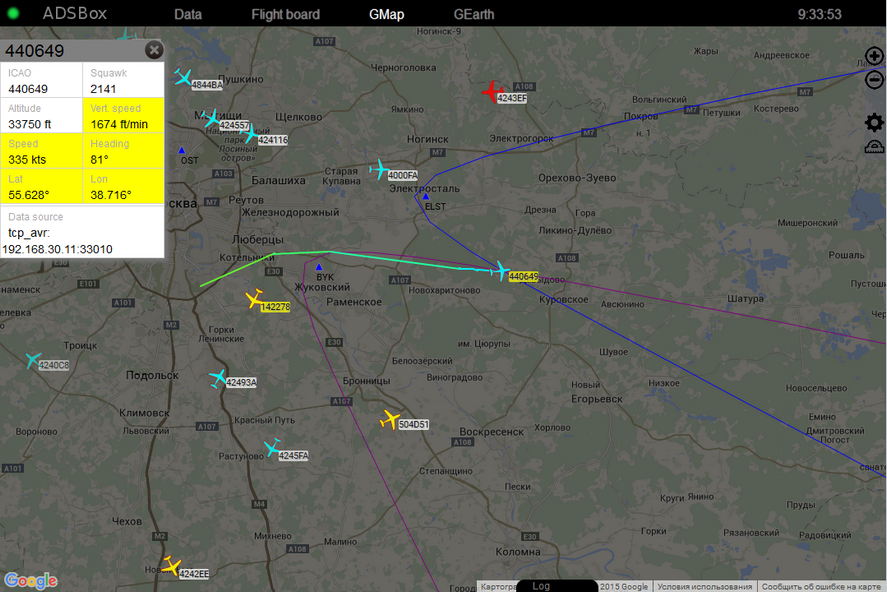
Рис. Работа с применением MLAT.
Для работы модуля необходим специальный декодер ADS-B, разработанный для этой задачи. Подробнее об этом написано в статье.


Андрей (Kit) сообщает об успешной установке ADSBox на NAS-сервер Synology USB Station 2. Устройство имеет следующую
конфигурацию.
-Marvell 88F6180 CPU Clock Rate: 800MHz
-RAM Size: DDR2 128MB
-10x100x1000Mbit Ethernet Port
-2X External USB Ports
-Power Consumption: 4W
-Size:46x122x111 mm
-Weight: 147g
Внутрь устройства на неиспользуемый USB порт установлена дополнительная флеш-память для установки
программного обеспечения. В качестве приёмника ADS-B применён USB декодер от Miro.
Автор устройства транслирует информацию на flightradar24.com (радар EFLP).
Nozdrin Andrew построил приёмник с ADSBox на основе платы
Olimex SAM9-L9260. Плата имеет следующую
конфигурацию.
- MCU: AT91SAM9260 16/32 bit ARM9™ 180MHz operation
- standard JTAG connector with ARM 2x10 pin layout for programming/debugging with ARM-JTAG
- 64 MB SDRAM
- 512MB NAND Flash (seen in Linux as silicon drive)
- Ethernet 100Mbit connector
- USB host and USB device connectors
- RS232 interface and drivers
- SD/MMC card connector
- Dimensions: 100 x 80 mm (3.94 x 3.15")


Для устройства изготовлен специальный корпус. В качестве приёмника ADS-B применён USB декодер от Miro.
[1] Технические положения, касающиеся услуг режима S расширенного сквиттера
[2] Annex 10 to the Convention on International Civil Organization. Volume IV
[3] An Expanded Description of the CPR Algorithm
[4] Minimum Operational Performance Standards for 1090 MHz Extended Squitter ADS-B and TIS-B
Исходный код декодера для Atmega8. Для сборки применить AVR Studio. Уже собранный hex файл.
Исходный код MLAT модификации декодера. Формат данных TIME AVR @0000xxxxxxxxx8D..., где xx - четырёхбайтный счетчик с частотой 20МГц. Hex файл.
adsbox-20110308.tar.gz Первая версия.
adsbox-20110614.tar.gz Исправлено декодирование координат для Южного полушария (спасибо, Антон Парфёнов);
декодирование вертикальной скорости; добавлено время истекания элемента CPR.
adsbox-20110716.tar.gz Декодирование DF5, DF21 (squawk).
adsbox-20111104.tar.gz Возможность записи и воспроизведения данных ADS-B.
adsbox-20111205.tar.gz Декодирование DF4 - Alexander Heidrich.
adsbox-20120401.tar.gz Использование SQLite в качестве базы данных; отображение данных в
Google Earth; встроенный web-сервер для отображения текущей обстановки.
adsbox-20120411.tar.gz Декодирование DF0; длинные опции в командной строке; установка параметров
com-порта (baudrate, bits) в командной строке; отображение диаграммы покрытия радара в GE (если указать свою широту-долготу).
adsbox-20120421.tar.gz Шаринг входных данных через tcp-порт;
использование tcp-сервера как источника данных (спасибо Sergsero за тестовый фид).
adsbox-20120427.tar.gz Декодирование данных с отметками MLAT (спасибо Petr Kouda за код и тестовый фид).
adsbox-20130125.tar.gz Декодирование DF11, DF20; источники данных могут работать одновременно; код источников данных выделен в отдельные файлы.
adsbox-20130224.tar.gz
Исправлена проверка CRC для DF11 (спасибо Andrew Hall и участникам
ModeSBeast@yahoogroups.com); переработаны веб-страницы (корневая
страница на http://192.168.x.x:8080); добавлена поддержка Google Maps и
плагина Google Earth.
adsbox-20130707.tar.gz Декодирование Gillham кода для расчёта высот; поддержка librtlsdr (USB SDR dongles).
adsbox-20131020.tar.gz
База данных для источников - возможность одновременной работы любых
источников, местоположение источников (опции --lat, --lon); SQLite query
analyzer на странице http://192.168.x.x:8080/sqlite.html; декодирование
наземного трафика (спасибо Lee Armstrong за лог Heathrow трафика);
декодирование SBS-3 данных приёмника Kinetic Avionics (спасибо Rene за
предоставленный фид); несколько потоков-декодеров с опцией
--dec-threads.
adsbox-20140405.tar.gz
Подписи к меткам на GM, метки масштабируются для удобного просмотра; на
страницу GM передаются только видимые на карте метки для уменьшения
трафика по сети; отметки времени в данных протокола SBS-1; использование
связанных списков вместо IPC очередей сообщений.
adsbox-20141214.tar.gz
Правки кода декодиования SBS-3 (спасибо, Nikolay Zlatev);настраиваемый
вид карты (подписи к меткам, цветовая схема, отображение области
радара); вкладка Data - статистика источников данных, график скорости
поступления данных; передача и приём avr данных по протоколу UDP;
поддержка приёмников Beast; keep-alive http соединения для увеличения
производительности.
adsbox-20150409.tar.gz
Декодирование DF17 type code 28, 29; обновлён веб-интерфейс; добавлены
фотографии воздушных судов (с сайта www.airport-data.com); всплывающие
сообщения о произошедших событиях (взлёт/посадка, изменение squawk и
т.д); линейка для измерения расстояний и азимутов на Google Map.
adsbox-20150509.tar.gz
Косвенный расчёт курса, скорости и вертикальной скорости на основе
других передаваемых данных, когда это возможно, в случае отсутвия
передачи этих параметров. Расчитанные таким образом данные подкрашены
жёлтым на веб-интерфейсе.
adsbox-20160417.tar.gz
Online индикатор; интерполяция при движении маркера воздушного судна на карте; отметки событий на маркере
воздушного судна; поддержка deflate-сжатия вебсервером; статистика потоков сервера (загрузка CPU, uptime);
индикация страны регистрации воздушного судна по 24-битному адресу; индикация авиакомпании по названию рейса;
отметки аэропортов на карте, индикация погоды (METAR) с сайта www.avwx.net; индикация DF-маски сообщений,
принятых от воздушных судов.
adsbox-20160617.tar.gz
Файл markerwithlabel.js сохранён локально; 1-бит коррекция данных для DF11, DF17 (полезно для sdr-приёмников).
adsbox-20170518.tar.gz
Поддержка IPV6; Window-подобный интерфейс веб страниц; отказ от Google Maps API в пользу Openlayers 3 API;
использование Cesium.js для отображения 3-х мерного вида взамен плагина Google Earth; комментарии пользователя для воздушных судов;
база данных контактов с воздушными судами; встроенный генератор отчётов на основе шаблонов; навигационный дисплей.
adsbox-20170705.tar.gz
Декодирование DF17 typecode 28 subtype 2 (TCAS RA), сообщения TCAS RA сохраняются в каталоге программы для дальнейшего анализа;
поддержка локального кэша тайлов карт для оффлайновой работы с картой.
adsbox-20180427.tar.gz
Изменяемый размер окон на веб-интерфейсе; смена версии OpenLayers API на 4; индикация флага SPI; возможность записи нового файла лога
через указанное количество часов; поддержка файлов KML при отображении карты (KML файлы следует добавить в каталог kml, спасибо Jaime
за тестовые KML файлы); поддержка TCP SBS-1 источника данных (текстовый MSG формат, например, для совместной работы с программой
JAERO);графические отчёты времени наблюдений борта и рейса;
линии расстояний самолёт-приёмник на карте.
Сохраните файл userdata.sqb перед обновлением для того, чтобы не потерять исторические данные.
@tty